5. Kapitel
8. März 2003Der NeuanfangLetzter Stand meines Heavens war irgendwann im Jahr 2001:Motor: Standart M1 (konnte die Drehzahl nicht konstant halten) Regler: Kontronik (eigentlich kein Drehzahlregler sondern ein Steller) Akku: 10 Zellen Sanyo RC2400 Kreisel: Ikarus Mini-Gyro (gemeine Temperaturdrift, immer nachtrimmen) Rotorblätter: S-Schlag GFK (mit CFK Verstärkung, waren gut) Drehzahl: unbekannt (hatte keinen Drehzahlmesser) In dieser Kombination ist auch das Rundflugvideo (44sec) entstanden, das auf der Video-Seite zum Download bereit steht entstanden. Danach gab es dann leider einen folgenschweren Crash, Ursache war ein vermutlich durchrutschendes Heckriemenantriebszahnrad. Der Heli hat plötzlich am Heck gezuckt, ich wollte ihn noch schnell landen, aber in einer Höhe von ca 50cm fing er plötzlich an sich mit hoher Geschwindigkeit wegzudrehen! Keine Chance! Vorsichtig Pitch wegnehmen und ... Crash. Schadensbilanz: - ein Rotorblatt gebrochen - ein Paddel zerbröselt - Chassis gebrochen - Motorträgerplatte gebrochen - Heckrohr geknickt - Zahnriemen angerissen Seit dem bin ich nichtmehr geflogen. Vor etwa 3 Monaten hab ich mich entschlossen wieder mit dem Helifliegen anzufangen, als erstes bestellte ich den Reflex-Simulator um erstmal am PC üben zu können, ohne gleich wieder Ersatzteile zu brauchen. Meinen Heli wollte ich außerdem gleich mit besseren Teilen wieder aufbauen, also kam noch hinzu: - Motor: HB 20-13 (Bürstenlos = Drehstrommotor) - Regler(!): Kontronik Smile 30-6-12 (6 bis 12 Zellen, 30A dauerstrom, 40A 10sec, 2A BEC) - Akku: Immernoch 10 Zellen RC2400 - Kreisel: GY240 von Futuba (SMM = driftloser Sensor, AVCS Modus möglich) - Alu Motorträgerplatte (erhöht die Steifigkeit des Rahmens stark, und kühlt den Motor) - Heavon UP Chassis (deutlich fester) - Drehzahlmesser (endlich kann ich gscheid einstellen) Die Hecksteuerhülse hab ich gegen einen Eigenbau ausgetauscht, da sie schon ziemlich abgeschliffen war, und nicht besonders leichtgängig war (hatte kein Kugellager): 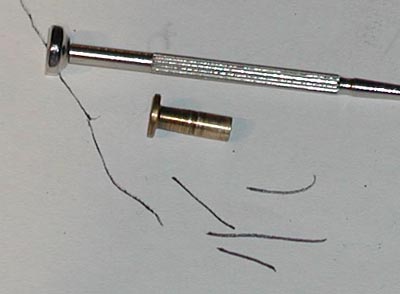 man kann deutlich erkennen das sie an der linken Seite einen geringeren Durchmesser als auf der rechten Seite hat! Hier der Eigenbau, er besteht aus einem kleinen Röhrchen, auf das ein Kugellager aufgepresst ist, das auf der Aussenseite einen Metallstift hat mit dem angesteuert wird: 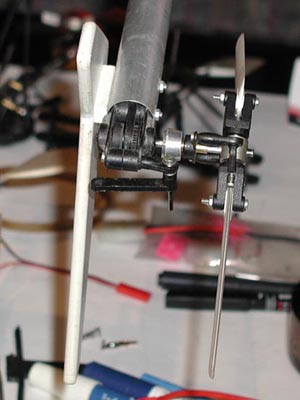 Und noch ein Bild des Heaven-Up-Chassis mit Alu-Motorträgerplatte, Bürstenlosem Motor und Heaven-Up Getriebe: 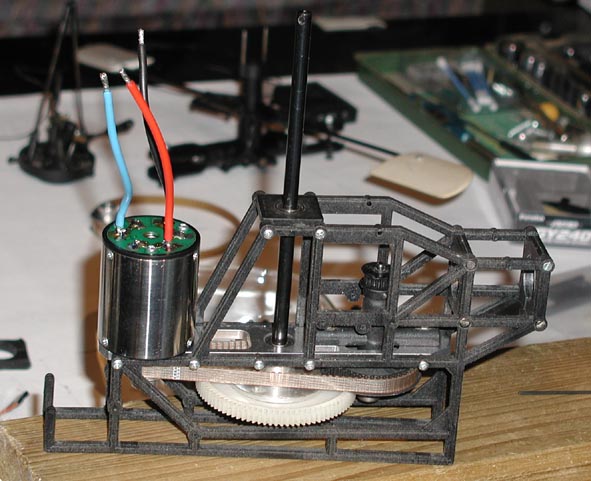 12. März 2003Mini Funk KameramodulWeil ich schon immer eine Live-Funkübertragung aus dem Heli verwirklichen wollte, habe ich mir bei Ebay eine Mini-Funkkamera mit integriertem Sender ersteigert, mit einem Preis von 94EUR sind die dort recht Preisgünstig. Andere Piloten berichten zwar das sie starke Empfangsprobleme hatten wenn die Kamera und der Sender aus dem Flugakku mit Strom versorgt wurden, aber ich werde es trotzdem erstmal ohne extra Akku testen, vielleicht hab ich ja mehr Erfolg. Zur Spannungsstabilisierung wurde diese Schaltung verwendet. Als Integrierter Festspannungsregler kam ein L7808CV zum einsatz, der wie der Name schon erkennen lässt stabilisierte +8V am Ausgang bereitstellt. Die blauen Elkos am Eingang und Ausgang haben jeweils 220uF (16V) die Größe scheint mir passend. Die beiden kleinen eckigen ganz nah am Ausgang sollen ein Schwingen des Festspannungsreglers verhindern und haben eine Kapazität von 18nF und 68nF (25V) und sind parallel geschaltet. Wichtig ist das keine Elkos eingesetzt werden dürfen da diese eine zu große Induktivität darstellen (durch die gewickelten Schichten). Getestet wurde die Schaltung bissher nur an Akkus ohne Spannungschwankungen, dabei kann die Eingangsspannung von 10-14V variieren ohne das sich die Ausgangsspannung ändert, für noch mehr Eingangsspannung müsste ein Kühlkörper angebracht werden. 29. Juni 2003neue ServobefestigungDa die standart Servobefestigung einen ziemlich lockeren Eindruck gemacht hat, wurden die Servos auf einer Alu-Platte festgeschraubt, so sitzen sie genau an der richtigen Stelle und können keinen Millimeter verwackeln. Am Blech für den linken Taumelscheibenservo sitzt auch der hintere Servo: Auf dem nächsten Bild sieht man die Befestigung des rechten Taumelscheibenservos, der blaue Fleck auf dem Hauptzahnrad ist zur Drehzahlbestimmung:  Hier sieht man den hinteren Servo, er ist mit Klebepads und einem Kabelbinder gesichert, hält bombefest: 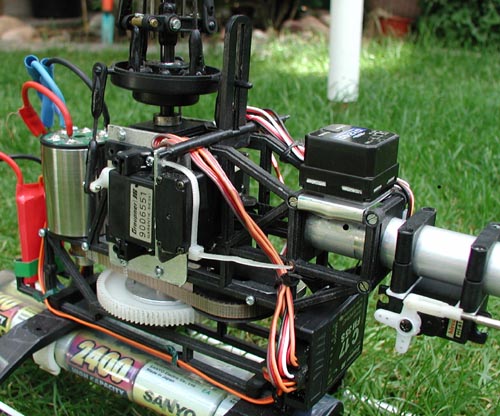 Der Empfänger und der Kreisel wurden mit einem dünneren Alublech direkt am Chassis befestigt, der Heckservo ist jetzt am Heckrohr befestigt, das hat den Vorteil das man die Stange nicht neu einstellen muss wenn der Heckantriebsriemen gespannt wird. Die Rotorblätter hab ich auch wieder montiert und den Pitch-Anstellwinkel auf min -2° und max +10° eingestellt, bei Schwebepitch (Knüppel in mittelstellung) sind es genau +6°. Danach hab ich die Drehzahl gemessen, mit dem mit dem Schieber am Sender kann man jetzt von 1180upm bis 1550upm einstellen, sollte also perfekt passen. 30. Juni 2003Testflug Mit diesem Trainingsgestell aus Schilfhalmen hab ich den ersten Testflug mit dem "neuen" Heaven gewagt, dazu bin ich wieder auf den kleinen Flugplatz hier in der Nähe gegangen, weil das Gras dort immer schön kurz ist und man sehr viel Platz hat. Nach ein paar Trimmungen und Einstellungen zum Heckrotor hat sich ziemlich schnell gezeigt das die Rotordrehzahl anscheinend zu niedrig ist bzw stark einbricht wenn ich mehr Pitch gebe. Ich musste den Knüppel fast auf Vollausschlag schieben damit der Heli abhebt. Ich glaube es liegt an der Getriebeuntersetzung zum Motor, deswegen werd ich das 18 Zähne-Ritzel mal gegen eins mit 20 Zähnen austauschen und dann nochmal mit mehr Drehzahl probieren. Ausserdem werd ich dann mal mit dem Drehzahlmesser (den man im Bild vor dem Heli sieht) messen wie weit die Rotorgeschwindigkeit beim Pitch-geben einbricht. Heli-Fliegen ist wie Radfahren, wenn man es einmal beherrscht dann verlernt man es nicht mehr, nach wenigen Sekunden in der Luft war es wieder ein gewohntes Gefühl ihn zu steuern, desshalb werde ich das Trainingsgestell schnell verkleinern, da es die Flugeigenschaften sehr negativ beeinflusst. Die Rotorkopfdrehzahl mit Heaven-UP Getriebe lässt sich übrigens mit Hilfe folgender Formel ausrechnen: (Riemenrad Zwischenwelle / Riemenrad Motor) * (Hauptzahnrad / Ritzel Zwischenwelle) Beispiel mit meinen Zahlen: (48 Zähne / 18 Zähne ) * (90 Zähne / 18 Zähne) = 13.33 : 1 das macht mit 10 Zellen (*1.1V pro Zelle unter Last) eine Hauptrotordrehzahl von: 11V * 1900upm/V = 20900upm / 13.33 = 1567upm Der Hauptrotor hat einen Durchmesser von 96cm, vielleicht braucht er da auch etwas mehr Drehzahl, oder der Akku ist schwach. |
Hier geht es weiter!