6. Kapitel
2. Juli 2003Probleme mit der DrehzahlUm dem Problem mit der Drehzahl mal genau auf den Grund zu gehen habe ich den Heli im Garten mit einem Brett und schweren Steinen am Boden festgehalten, um zu sehen wie sich die Drehzahl und die Akkuspannung verändert beim Pitchgeben. Diesmal mit einem 20er Riemenrad am Motor, statt dem 18er beim letzten Versuch.Das ganze sah dann so aus: (der Heckrotor steht wirklich, da er schon beim Ausdrehen war) 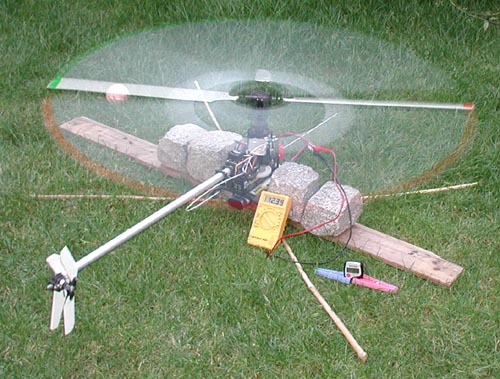 Messergebnisse:
Daraus lässt sich erkennen das der Motor nicht in der Lage ist Drehzahlen höher als 1300upm am Rotor stabil zu halten wenn ich das kollektive Pitch über die Mittelstellung hinaus erhöhe. Der Akku sinkt auf minimal 10.5V ab, das ist aber noch im grünen Bereich und kein Grund zur Sorge. Mit diesen Einstellungen bin ich dann auch mal auf dem Flugplatz geflogen, das Trainingsgestell ist schon ein bisschen gekürzt worden, das ganze sieht dann so aus:  Viel mehr ging auch nicht, da die Drehzahl eben immernoch eingebrochen ist wenn ich mehr Pitch gegeben habe. Zwischendurch wurde der Akku auch mal am Auto geladen:  Als nächstes wird mal ein kleineres Riemenrad am Motor ausprobiert mit 16 statt 18 bzw 20 Zähnen, vielleicht bringt das ja die erhoffte Leistung. 10. Juli 2003Endlich konstante DrehzahlNachdem kein 16er Riemenrad bei meinem Modellbauhändler vorrätig war hab ich mal eins mit 14 Zähnen getestet, das hat zwar bewirkt das die Leerlaufdrehzahl einiges niedriger ist am Rotor, aber bei Last ist sie leider noch weiter eingebrochen und war erst bei ca 890upm stabil. Nachdem ich mal im Forum von rc-line.de nachgefragt hab, hab ich dann den Tipp bekommen den Motor nicht in Sternschaltung sondern in Dreiecksschaltung zu betreiben. Das verursacht eine drei mal so hohe Leistungsabgabe bei gleicher Betriebsspannung. Leider muss man dazu auch die Übersetzung ändern, da der Motor dann eine deutlich höhere Drehzahl hat. Erste Tests mit dem 14er Riemenrad haben das auch bestätigt, er drehte bis zu 1600upm im Leerlauf, wurde dann aber abgewürgt. Es musste also ein noch kleineres Riemenrad her, 12 Zähne sind das kleinste das man bekommt. Mit der neuen Übersetzung habe ich die Drehzahl dann endlich stabil bei den gewünschten 1350upm am Rotor bekommen.Während den Tests im Garten war wieder mein Kater Tobi anwesend:  Auf dem Flugplatz habe ich dann erstmal einen Akku komplett leer geschwebt, das Trainingsgestell wurde noch kleiner geschnitten, dadurch reagiert er wieder schneller auf Heck-Steuerkommandos. Aber die Ausschläge der Servos für die Taumelscheibe muss ich wohl vergrößern, da reagiert er mir zu träge. Ansonsten fliegt sichs echt gut mit konstanter Drehzahl :-) Beim zweiten Flug wurde die Zeit mitgestoppt, er ist etwas über 7 Minuten in der Luft gewesen, das ist für einen Bürstenlosen Antrieb eine ziemlich schlechte Zeit, ich hoffe es liegt am alten Akkupack. Dass er sich stark erwärmt hat spricht dafür. 18. Mai 2004Weitere Versuche Teil 1, BodentestsNach einer sehr langen Flugpause, auch wegen den Abschlussprüfungen und Ausbildung in Nürnberg (...), bin ich endlich wieder vom Helivirus infiziert worden ;). Heute hab ich am Heli einen Rundumcheck durchgeführt, und dabei ein paar Mängel festgestellt:1. Das hintere Taumelscheibenservo hat den Hebel bei Mittelstellung leicht nach unten geneigt, die beiden Vorderen nach Oben, das führt bei starken Ausschlägen zu Ungleichheiten und verschlechtert sicher das Steurverhalten. Früher ist mir das nicht aufgefallen und ich hab (nicht besonders erfolgreich) Versucht mit der elektronischen Servowegbegrenzung und -trimmung zu kompensieren. 2. Der Mitnehmer für die Anlenkung der Paddel hat sich anscheinend irgendwann gelöst, so konnte sich das Gestänge ein bisschen verdrehen, das wirkt sich sicher auch nicht positiv auf die Taumelscheibensteuerung aus. 3. Der Servohebel links ist angebrochen, wird vor dem 1. Flugversuch ausgetauscht gegen einen Unbeschädigten. Weil ich noch schlechte Erinnerungen an die Flugzeig und -leistung hatte, hab ich mal die Spannung am Akku (GP3300 NiMh) und die Stromentnahme (per 1mOhm Shunt) gemessen: wenn alle Servos arbeiten fließt ca 1A, wenn maximale Drehzahl (1600upm) und fast maximales Pitch gegeben wird 25A, bei 11.1V. Daraus ergibt sich eine Leistung von 277 Watt! Ein Heli dieser Größe braucht zum Schweben etwa 150W-180W, im Rundflug ca 120-130W, es sollte also genügend Reserve zur verfügung stehen, außer es geht irgendwo sehr viel Leistung verloren. Demnächst werde ich einen Kompletten Akku mit maximaler Leistung am Boden leeren, sollte etwas über 7 Minuten dauern. Der Innenwiderstand des kompletten Akkupacks samt Stecker beträgt ca 78mOhm, das ist ein guter Wert. 4. Juni 2004Weitere Versuche Teil 2, SchwebenNachdem ich nun zumindest die Leistungsaufnahme kenne, und auch der Akku ziemlich fitt scheint, hab ich mich auf ne große freie Wiese gewagt und den Heli im Schwebeflug erprobt.Flugzeit lag bei etwa 9,5 Minuten Schweben, kein besonders guter Wert für nen Bürstenlos Antrieb. Die Steuerfolgsamkeit und auch das Flugbild waren sehr gut, leichte Vibrationen am Hilfslandegestell hörten auf, nachdem ich es um 5cm auf jeder Seite gekürzt habe. Der Motor wird deutlich spürbar warm, das deutet eine Fehlanpassung an. Vielleicht sind 9,5Minuten Schweben (danach noch 1 Minute mit deutlich weniger Leistung) mit 1600Upm auch normal. Warnung: Beim 2. Schwebeversuch traten starke Vibrationen am ganzen Heli auf, die Ursache war ein Bruch im unteren Bereich des Chassis, wahrscheinlich verursacht durch Bodentests zwischendurch, dabei bilden sich sog. Bodenresonanzen die den ganzen Heli zerstören können! Deshalb rate ich von Bodentests ab und werde auch selbst keine mehr durchführen, das Risiko ist zu groß! Noch ein bisschen Theorie: Von einem anderen Heli-Piloten habe ich erfahren, dass er Flugzeiten von 17-18Minuten mit diesem Motor an 10Zellen GP3300 bekommt. Meine Flugzeit ist also tatsächlich ziemlich schlecht. Der andere Motor wird allerdings in Sternschaltung bei nur 1800upm/V (1350 RRPM=Rotor RPM) betrieben. Der Motor arbeitet dann also im Wirkungsgradmaximum, viel mehr Leistung ist einfach nicht drin. Genau diese Untersetzung hatte ich schon mit dem 20er Ritzel, bleiben also noch 4 Möglichkeiten: 1. der Regler kommt nicht richtig mit dem Motor zurecht, oder 2. die Rotordrehzahl von 1600upm ist zu hoch, oder 3. der Motor hat für meine Ansprüche einfach deutlich zu wenig Leistungsreserven. 4. der damalige Akku war zu schwach, oder |